Enhancing autonomous systems via flow sensing and estimation
The Aerospace Systems Modeling, Analysis, & Control Lab (AeroSMAC Lab) at the University of Minnesota is developing methods to model, analyze, and control fluid flows (e.g., air and water) to enhance operating efficiency, reliability, and performance in autonomous aerial and marine systems. A key line of this research is on flow state estimation: i.e., methods for “fusing” available sensor measurements with predictive models to estimate the dynamic state of the surrounding air or water. This research presents a formidable technical challenge: Typically, only a small number of locally placed sensors are available for flow monitoring, whereas the fluid flow itself evolves over a large extent of space. Can the flow field be reconstructed using only a limited local sensor measurement? What are the pertinent signals that must be sensed to make informed control decisions? These are among the driving questions being tackled by researchers in the AeroSMAC Lab.

There are ample opportunities to enhance efficiency, maneuverability, and resilience in autonomous aerial and marine systems using flow state estimation; however, the full power of these technologies has been relatively untapped. Consider, for example, that it is possible for formations of aircraft to “surf” each others’ air wake vortices to reduce induced drag—which is responsible for up to roughly 40% of the total drag budget in large transport aircraft. Within the hydrodynamic environment, experiments have shown that even a dead fish can “swim” through passive interactions with a bluff body wake—an impressive demonstration of energy harvesting! To achieve these benefits in autonomous aerial and marine systems, it is important to identify the location and orientation of the wake since this information is needed in many wake surfing strategies.
Researchers in the AeroSMAC Lab has contributed to sense and dynamic estimation algorithms for characterizing and tracking vortex wakes to emanate from aerial and marine systems alike. In both instances, researchers leveraged low-order vortex element models as a convenient (physics-based) approach for modeling the aero- and hydrodynamic processes. For aircraft wakes in cruise, quasi-static wake models are reasonable, and so the modeling and estimation problems are considerably simpler—though the specific nonlinearities appearing in the problem introduce a different set of challenges. For bio-inspired propulsors (e.g., fish and robotic swimmers), the wake dynamics are exotic and can exhibit a remarkable variety of behaviors, requiring different wake tracking and surfing strategies for optimal execution.
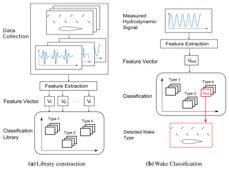
In a recent study, researchers developed simple supervised machine learning algorithms to detect a nearby wake from a single pressure sensor on a fish-like body and to classify the wake regime from a library of candidate wake types using nearest neighbor techniques. Although this was a proof-of-concept study, it demonstrated that hydrodynamic signals could be used to delineate between different wake regimes and to even infer the location and motives of a nearby object—as an inanimate bluff body would generate a different wake than an efficiently swimming fish or a thrust-maximizing robotic swimmer. If a wake library is not already available, then unsupervised machine learning methods offer some hope in constructing these labels from available wake data, as demonstrated.
Wake sensing is only one of a variety of flow state estimation concepts that can enhance autonomous aerial and marine systems. For example, the AeroSMAC Lab is now developing flow state estimation technologies to enable high-precision control of autonomous hypersonic flight systems (i.e., flight systems that travel faster than five times the speed of sound). Achieving reliable control without sacrificing performance is incredibly challenging at such extraordinary flight speeds. These challenges are compounded by the limitations in sensors available in hypersonic flight. It’s no wonder a successful outcome for flow state estimation is expected to bring game-changing improvements and capabilities for hypersonic flight control and autonomy. This research is supported by a newly awarded grant through the University Consortium on Applied Hypersonics and the Joint Hypersonics Transition Office. The University of Minnesota is teaming up with industry partners at Collins Aerospace and Lockheed Martin Corporation to help ensure this technology will transition beyond the proverbial valley of death and into future autonomous hypersonic flight systems.